
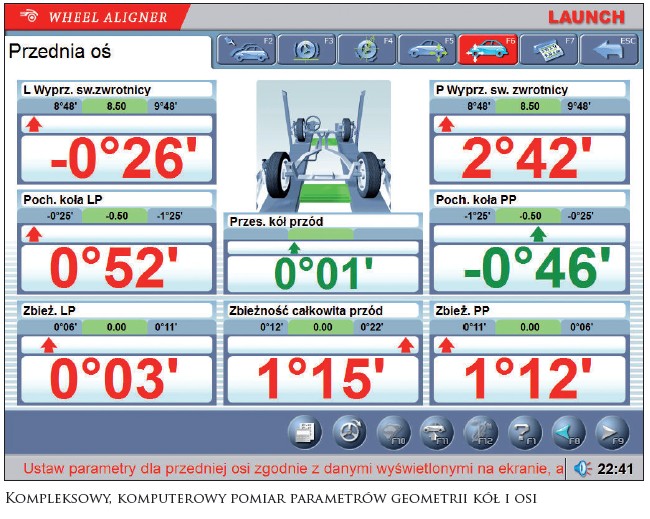
Проверка геометрии колеса и оси (часть I)

Рис. Launch, Acurazine, архив
Передний свес, продольный клиренс, задний свес
От правильного выравнивания колес относительно продольной и поперечной плоскости симметрии шасси транспортного средства зависит оптимальная адгезия шин к поверхности и максимальная прочность их протекторов.
При неправильной геометрии шасси ускоренный расход шин и топлива сопровождается стремлением автомобиля автоматически менять направление движения водителя, а также продольные и поперечные направляющие. Правильная регулировка колес определяется изготовителем и указывается в руководстве по обслуживанию транспортного средства посредством соответствующих угловых или линейных соотношений, периодически контролируемого специального оборудования и, возможно, корректируется во время обязательных или дополнительных технических испытаний. Эти зависимости обуславливаются либо конструированием соответствующих сборочных узлов шасси, либо использованием дополнительных механизмов регулирования.
Геометрические параметры
Общая концепция геометрии колес и осей транспортных средств касается явлений, возникающих при работе подвесок и рулевых систем. Важную роль в конструкции современных автомобилей играет так называемая Эластокинетика, то есть общее поведение, связанное с изменением положения колес, вызванным силами и моментами, действующими между шиной и поверхностью.
Параметры, вытекающие непосредственно из предположений, предшествующих конструкции дорожного транспортного средства, включают в себя:
- колесная база, то есть расстояние, измеренное от центра передней оси до центра задней оси;
- параллельность оси контролируется путем измерения расстояния между их концами;
- Колесная колея - это расстояние между геометрическими центрами колес данной оси.
Чтобы обеспечить транспортное средство адекватными характеристиками вождения (включая способность автоматически поддерживать прямое направление движения и правильное вращение всех колес по кривым кривым), его передние и задние колеса (за исключением задних ведомых колес, установленных на жестком мосту тяги), устанавливаются не параллельно продольная плоскость симметрии шасси.
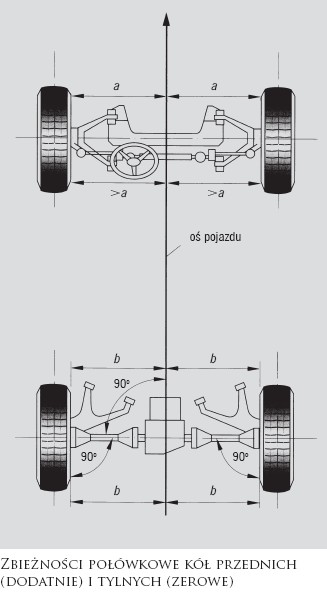 Параллельность, при которой крайняя передняя и крайняя задняя точки окружности колеса находятся на разных расстояниях от упомянутой плоскости симметрии, называется половиной сходимости. Конвергенции для обоих колес одной и той же оси (измеренные в миллиметрах или угловых градусах) должны быть идентичными, и их сумма представляет собой общую конвергенцию. Это может (так же как и половина сходимости) принимать значение:
Параллельность, при которой крайняя передняя и крайняя задняя точки окружности колеса находятся на разных расстояниях от упомянутой плоскости симметрии, называется половиной сходимости. Конвергенции для обоих колес одной и той же оси (измеренные в миллиметрах или угловых градусах) должны быть идентичными, и их сумма представляет собой общую конвергенцию. Это может (так же как и половина сходимости) принимать значение:
- положительный (когда передняя часть окружности колеса ближе к центру шасси, чем к задней части);
- ноль (когда расстояния передней и задней части окружности равны плоскости симметрии шасси);
- отрицательный, также называемый расхождением (когда задняя часть окружности колеса ближе к центру шасси, чем спереди).
Сходимость - это параметр, который обычно задается в виде диапазона допустимых значений (от ... до ...) или в виде единого стандартного значения с допустимыми отклонениями. Он подлежит периодической проверке и возможной корректировке.
Настраиваемые параметры (хотя и не все строительные решения) также включают в себя:
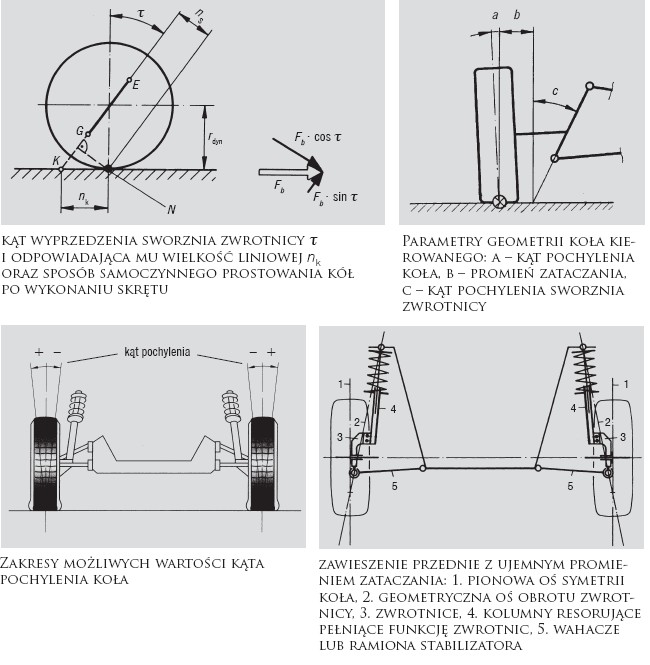
- угол наклона колеса, принимающий положительное значение, когда верхняя часть окружности обода находится дальше от продольной плоскости симметрии, чем нижняя (также возможно отрицательное или нулевое значение);
- ведущий угол оси поворота (всегда положительный), который образует эту ось с вертикальной линией, проходящей через центр контакта колеса с поверхностью.
Другие геометрические параметры не регулируются, но они структурно определены и включают в себя:
- угол наклона оси рулевого управления, измеренный относительно вертикали в поперечной плоскости относительно продольной линии симметрии шасси;
- ступенчатый радиус, то есть расстояние между точкой пересечения оси рулевого управления с уровнем проезжей части и центром поверхности контакта колеса с поверхностью;
- смещение оси вращения переключателя относительно оси вращения колеса в плоскости, проходящей через другую из упомянутых осей;
- Разница в углах максимального поворота внутреннего и наружного колес.
Практическое значение геометрических параметров
Колесная база, очевидно, связана с длиной транспортного средства, но это ни в коем случае не является однозначным соотношением, поскольку в отдельных конструкциях размеры так называемых свесы, то есть детали, расположенные перед передней или задней осью. Только тогда соотношение длины всего кузова и колесной базы оказывает существенное влияние на ходовые качества. Чем меньше часть этой длины приходится на передний и задний свесы, тем более устойчивым становится движение за счет ограничения продольных тенденций и возможности использования более мягких подвесок. Кроме того, нагрузка на автомобиль распределяется более равномерно по обеим осям.
Использование относительно меньшей колесной базы, с другой стороны, поддерживается за счет увеличения маневренности транспортного средства, что приводит к уменьшению радиуса поворота при том же угле поворота. Расстояние между осями легковых автомобилей обычно находится в пределах 2160-3040 мм.
Колесная база (особенно в отношении общей ширины и расположения центра тяжести автомобиля) важна для устойчивости движения при прохождении поворотов. Это также ограничивает боковой наклон тела, вызванный другими факторами. Следовательно, он должен быть максимально большим. В случае легковых автомобилей она обычно составляет от 1210 до 1600 мм.
В случае независимых подвесок ширина колеи не постоянна, так как она изменяется в зависимости от степени отклонения пружин, что сопровождается неблагоприятным явлением бокового смещения и вызванным ими (особенно в случае низкопрофильных шин) боковыми силами, значительно увеличивающими сопротивление качению и препятствующими поддержанию направления движения по прямой. ,
Точно так же для большинства независимых конструкций подвески угол наклона колеса зависит от его мгновенных нагрузок. Небольшой положительный наклон колес обеспечивает их перпендикулярное положение к выпуклой поверхности дороги, что положительно влияет на их сцепление, сопротивление качению и равномерность износа протектора шин. Однако при быстром повороте указываются отрицательные значения углов колес, поскольку они наклоняются вдоль кузова, что вызывает чрезмерное увеличение положительного угла (относительно поверхности дороги), то есть уменьшение сопротивления боковому сносу. Именно поэтому подвески сконструированы таким образом, что на шаге отскока колеса получают отрицательный угол наклона, а при ударе отскока - положительный.
Помимо номинального значения угла наклона колеса (всегда относящегося к конкретной нагрузке испытываемого транспортного средства), очень важно определить его допуск, то есть максимальные отклонения и допустимую разницу между углом наклона правого и левого колес. На практике отклонения в ± 30 'и различия в углах колес в пределах 30' являются общепринятыми.
Конвергенция также изменяется во время вождения, и это является причиной его использования. Причиной является компенсация упругих деформаций системы рулевого управления и подвески в неподвижном транспортном средстве, так что при движении колеса вращаются параллельно продольной плоскости симметрии шасси. В случае ведомых колес деформации изменяют сходимость в сторону ее положительных значений, поэтому для получения наиболее желаемого нулевого значения требуется слегка расходящаяся начальная настройка. С колесами, которые не передают привод, мы сталкиваемся с обратным явлением.
Ось поворота рулевого моста совершает поворот после поворота колеса, и все рулевое управление автоматически возвращается в положение, соответствующее прямолинейному направлению движения. Однако на величину сил, необходимых для их отклонения от этого нейтрального положения, влияет не только угол продвижения, но и радиус качения, в свою очередь зависящий от угла наклона оси рулевого управления и угла наклона колеса. Чем выше углы, тем меньше радиус поражения. При нулевом значении силы, необходимые для того, чтобы управляемые колеса достигли минимального уровня. В диапазоне отрицательных значений пораженного радиуса поперечные сечения, в свою очередь, получают возможность автоматически корректировать траекторию после того, как она была нарушена неровностями на поверхности.
Установленные на заводе параметры геометрии колеса во время эксплуатации автомобиля могут подвергаться изменениям (постепенным или аварийным из-за дорожных столкновений), которые превышают допустимый диапазон их значений. Поэтому они требуют периодических проверок.